Development & Prototyping
Drones for Distributed Swarm and Formation Flight
Discover UVDAR: advanced relative localization system for seamless UAV cooperation and redundancy in any environment.
Application
Distributed Swarm and Formation Flight with Lightweight Autonomous Drone Systems
Lightweight autonomous drones provide mobility and agility to perform field tasks much more efficiently than other solutions. Their main drawback for such applications is the limited carrying capacity, imposing limits on the amount of payload they are capable of transporting, including sensory equipment and cargo. This limitation can be overcome by deploying multiple individual UAVs in parallel, such that they will cooperate on a common task.
Modern algorithms such as autonomous swarms and formation flight can allow for performing complex tasks faster and more efficiently than any individual vehicle. Additionally, cooperating UAVs also provide redundancy in case of failure of a part of the overall system, higher area coverage and flexibility, the ability to space-out sensors according to task specifications and more.
Among our product line-up we provide platforms capable of such cooperative operations in field conditions without dependence on external localization infrastructure such as Motion-capture systems or GNSS by leveraging specialized onboard relative localization systems.




Images source: MRS FEE CTU
Solution
Relative Localization Module UVDAR
Fly4Future in cooperation with the Multi-Robot Systems group has developed a relative localization system called Ultra-Violet Direction and Ranging (UVDAR) that uses near-ultraviolet LEDs and specialized onboard camera sensors to obtain relative localization of neighbor UAV units.
This system works independently of radio communication and is thus suitable for deployment in arbitrary conditions where such communication is unavailable. UVDAR is compatible with a wide range of light conditions, making it suitable for arbitrary outdoor and indoor deployment regardless of the time of the day. UVDAR can provide 3D relative position and orientation estimate of a neighbor UAVs with arm span of at least 40 cm, and can also provide limited data transmission capabilities.

UVDAR exploits LED lights active in the near-ultraviolet band, enabling efficient background removal through optical filtering. This makes the system reliable, yet lean enough to deploy on UAVs with limited computational resources. Image source: MRS FEE CTU

The active UV markers used in the UVDAR system blink with specialized sequences allowing the observer to reliably distinguish individual targets from each other.

The output of the system is the relative position and orientation of the target, with the associated measures of the precision.

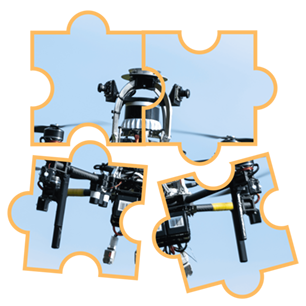
The UVDAR system onboard of our UAVs. Red circles show the UV-sensitive cameras and green circles show UV LED markers.
Images source: MRS FEE CTU

UVDAR explpoits the property of sunlight that it is weaker in near-ultraviolet range than in the range of visible light or near-infrared. This allows the system to detect markers by low-cost cameras, while easily filtering out backgrounds.
Scalability
Complementing UVDAR with UWB Module
For smaller, ultra-mobile aerial robots such as our very own F4F RoboFly, we combine UVDAR with Ultra-wide bandwidth (UWB) transceivers to obtain a precise and reliable relative position estimates.
UWB is a system for mutual distance estimate using bi-directional wide-bandwidth radio bursts, and is complementary to UVDAR’s reliable visual relative direction (bearing) measurements for smaller UAVs. In addition, UVDAR and the UWB transceivers operate independently of each other, providing increased robustness to relative localization failure. This UVDAR-UWB combination is provided as an antenna module combined with a calibrated camera.
The UVDAR system is highly precise in neighbor bearing estimation, while UWB ranging provides reliable estimates of their distances. The two sensors thus form a complementary pair that can provide to the user full 3D relative position of a neighbor with high precision.

Image source: MRS FEE CTU

Ultraviolet LED marker
Ultraviolet LED marker transmits specialized blinking signal with unique identity.
Ultraviolet-sensitive Rear Camera
The foundation of the UVDAR system - observe the blinking LED markers. This provides the UAV with identities and relative directions (bearing vectors) of their neighbors.
Ultraviolet-sensitive Front Camera
The foundation of the UVDAR system - observe the blinking LED markers. This provides the UAV with identities and relative directions (bearing vectors) of their neighbors.
UWB Transceiver
An Ultra-Wideband (UWB) transceiver uses wide-band radio transmission pulses to estimate the relative distances between cooperating UAVs.
Main Computer
By fusing the bearing vectors obtained by UVDAR with the distance estimates from UWB transceivers the UAV obtains full relative positions of neighbor units with high precision.
The F4F RoboFly platform with optional relative localization modules.
Unlocking potential
UVDAR Applications in the Real World
Swarm Robotics

Image source: MRS FEE CTU
The Multi-Robot Systems group at the Czech Technical University in Prague, from which Fly4Future, a spinout of the university, originates, conducts extensive research into theoretical swarm flight of UAVs in real-world conditions. The UVDAR system was a key enabling technology for practical testing of the proposed swarm algorithms that allowed the group to perform such flight in real-world locations such as the desert, and even in the cluttered environment of a forest.
Image source: MRS FEE CTU
Reference:
– Pavel Petráček, Viktor Walter, Tomáš Báča and Martin Saska. Bio-Inspired Compact Swarms of Unmanned Aerial Vehicles without Communication and External Localization. Bioinspiration & Biomimetics 16(2):026009, December 2020.
– Jiri Horyna, Tomas Baca, Viktor Walter, Dario Albani, Daniel Hert, Eliseo Ferrante and Martin Saska. Decentralized swarms of unmanned aerial vehicles for search and rescue operations without explicit communication. Autonomous Robots, pages 1-17, 2022.
– Filip Novák, Viktor Walter, Pavel Petráček, Tomáš Báča and Martin Saska. Fast collective evasion in self-localized swarms of unmanned aerial vehicles. Bioinspiration & Biomimetics 16(6):066025, November 2021.
Dataset Gathering

Image source: MRS FEE CTU
Machine learning-based computer vision is a popular state-of-the-art technology. It can be used to detect UAVs from air using RGB cameras. However, such computer vision requires annotated training datasets gathered in an environment of interest. Dataset gathering and image annotation is normally a difficult and time-consuming task. With UVDAR, this task can be automated by deploying it onboard as a source of ground-truth relative position sensor used to mark UAVs in onboard camera images.
Image source: MRS FEE CTU
Reference:
– V. Walter, M. Vrba and M. Saska. “On training datasets for machine learning-based visual relative localization of micro-scale UAVs”. In 2020 IEEE International Conference on Robotics and Automation (ICRA). August 2020, 10674-10680.
Formation Flights
Compared to swarms, which are flexible and resistant to noise and failures but do not maintain a desired shape, formation flights are more difficult to perform based on onboard sensors alone.
Recent research showed how a team of UAVs can perform this challenging task, which was shown to work in real world using UVDAR.
Video source: MRS FEE CTU
Reference:
– Viktor Walter, Matouš Vrba, Daniel Bonilla Licea and Martin Saska. Distributed formation-enforcing control for UAVs robust to observation noise in relative pose measurements. arXiv preprint arXiv:2304.03057 (2023).
– V Walter, N Staub, A Franchi and M Saska. UVDAR System for Visual Relative Localization With Application to Leader–Follower Formations of Multirotor UAVs. IEEE Robotics and Automation Letters 4(3):2637-2644, July 2019.
Watch
UVDAR In Action
Video source: MRS FEE CTU
Start Using Our UVDAR
Be one step ahead and save your valuable resources with our expertise gained from years of research, development, and countless successful real-world experiments.
Read about
Our Work

Dynamic Cognitive Mesh for Drone Communication
We have created a dynamic cognitive multi-modal mesh for ad-hoc communication within extensive heterogeneous teams of multiple robots.

Autonomous Drones for Surveillance and Reconnaissance
A unique solution for camera surveillance system integrated into collaborating autonomous drones.

Autonomous Drones Landing on Moving Vehicles
A unique solution designed for perception, control and trajectory planning enabling drones to precisely land on moving vehicles.

Drones for Inspection of Power Lines

Radiation Detecting Drone

Discover The Drone Hunting System

AI Flying Robot for Safe Capture of Unauthorized Drones
EU co-funded project aiming to create AI-equipped flying robot for safe capture of unauthorized drones in protected space

Autonomous Air and Ground Robots

Autonomous Solar Park Maintenance
System for automated monitoring and maintenance of solar parks employing artificial intelligence and unmanned aerial platforms.

We Help You to Establish Flying Robots’ Research/Lab
From modular drones to tailored software and field-tested platforms, we help you build and scale your research in autonomous flying systems.

Multi-Robot Aerial System for Autonomous Surveillance and Inspection
Multi-robot aerial system for autonomous surveillance and inspection of large industrial complexes resistant to communication and GNSS signal failures.

Drone Delivery
Research project focusing on supporting implementation of urban air mobility for parcel delivery.
Explore
What We Do
Custom Drones
We custom-build ready-to-fly fully autonomous drones that can be adjusted for any application and industry.

Development & Prototyping
We design and develop advanced autonomous aerial systems to meet the particular needs of our individual clients.

Research Projects
We participate in many projects in various fields financed by the EU and Czech Republic, as well as private research institutions.