Custom Drones
Autonomous Drones Landing on Moving Vehicles
A unique drone solution for tracking, trajectory planning and safely landing on vehicles in motion.
Application
Drones Landing on Moving Vehicles
Autonomous and precise take-off and landing are crucial for various applications involving drones. For instance, docking into recharging stations, or in information gathering and delivery applications, drones need to reach precise positions and return to a base accurately. However, the challenge becomes more significant when it comes to landing on a moving vehicle. This task requires even more advanced capabilities, especially if the drone lacks a precise localization system. Additionally, the operational time is often limited in such scenarios, making it essential for the drone to cooperate with another vehicle.
By enabling vertical take-off and landing on a moving vehicle, UAV systems can be deployed from boats, trains or cars near target locations of the mission. This approach allows for short-term flights that effectively utilize the capabilities of UAVs while extending their operational range when combined with a moving vehicle.

Landing safely on a moving vehicle can be a challenging task for a drone.
Solution
A Unique Autonomous Landing System for Drones from Fly4Future
Fly4Future’s founder & CTO Dr. Martin Saska and some of our employees were core members of the MRS CTU international team competing at the renowned Mohamed Bin Zayed International Robotics Challenge (MBZIRC), March 16-18, 2017, at the Yas Marina Circuit in Abu Dhabi, UAE. Read more about the competition here.
Under the leadership of Dr. Saska, the team made a significant contribution and achieved the silver position in this prestigious competition. Their focus was on the category of autonomous landing on a moving vehicle, the area that has been described in hundreds of academic works but rarely performed in the real-world conditions. The challenge aimed to autonomously localize a moving vehicle in the competition arena by a single MAV and then land on a landing platform carried by the vehicle.

The winning team with the Fly4Future team members.
The successful solution was designed to address the challenges of perception, control, and trajectory planning for an aerial robot that can identify and land on a moving vehicle.
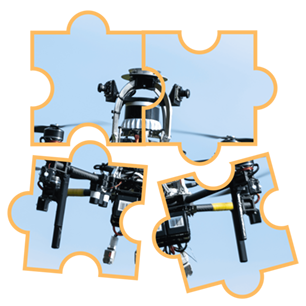
The drone is equipped with on-board sensors and a computer that enable it to detect the vehicle using a monocular camera. It then predicts the future movement of the car using a nonlinear motion model. Once the drone has identified and predicted the movement of the vehicle, it follows it closely until it can successfully land on the car’s roof.

Drone successfully landing on a moving car during the competition.
In detail
Stability, Minimum Error Rate, and Fast Landing
To ensure stability during landing, magnetic legs are used to attach themselves securely to the vehicle. This entire process is fully autonomous, from take off to landing. Moreover, a novel control system uses a Model Predictive Controller (MPC) in real-time to generate a reference trajectory for the drone. This trajectory is then tracked by a nonlinear feedback controller, which helps minimize any position errors between the drone and its predicted target. In conclusion, this combination of technologies enables accurate tracking of vehicle motion predictions with minimal mis-positioning. Consequently, this efficient solution achieved the fastest landing among all competing teams at the MBZIRC 2017.
The members of the successful MRS CTU competition team were later recruited by Fly4Future and have since become valued employees who, thanks to the experience gained in the competition, expanded the expertise of the company. Currently, Fly4Future is actively involved in the process of commercializing the results achieved during the competition.

Drone landing safely on the board of a floating boat. Read more about our solution for marine operations here.
Start Building Your Drone Online
Build your drone with our custom drone-building tool DroneBuilder.
You will be able to:
- Configure your drone exactly to your needs
- Consult your configuration with our specialist for free
- Use our expertise to find the right components
- Perfect your drone design
Be one step ahead and save your valuable resources with our expertise gained from years of research, development, and countless successful real-world experiments.
Read about
Our Work

Dynamic Cognitive Mesh for Drone Communication
We have created a dynamic cognitive multi-modal mesh for ad-hoc communication within extensive heterogeneous teams of multiple robots.

Autonomous Drones for Surveillance and Reconnaissance
A unique solution for camera surveillance system integrated into collaborating autonomous drones.

Drones for Inspection of Power Lines

Radiation Detecting Drone

Discover The Drone Hunting System

UAV Swarm for Desert Flight
A fully equipped research drone for multi-UAV (swarm) missions in harsh environments, such as deserts and forests.

AI Flying Robot for Safe Capture of Unauthorized Drones
EU co-funded project aiming to create AI-equipped flying robot for safe capture of unauthorized drones in protected space

Autonomous Air and Ground Robots

Autonomous Solar Park Maintenance
System for automated monitoring and maintenance of solar parks employing artificial intelligence and unmanned aerial platforms.

We Help You to Establish Flying Robots’ Research/Lab
From modular drones to tailored software and field-tested platforms, we help you build and scale your research in autonomous flying systems.

Multi-Robot Aerial System for Autonomous Surveillance and Inspection
Multi-robot aerial system for autonomous surveillance and inspection of large industrial complexes resistant to communication and GNSS signal failures.

Drone Delivery
Research project focusing on supporting implementation of urban air mobility for parcel delivery.
Explore
What We Do
Custom Drones
We custom-build ready-to-fly fully autonomous drones that can be adjusted for any application and industry.

Development & Prototyping
We design and develop advanced autonomous aerial systems to meet the particular needs of our individual clients.

Research Projects
We participate in many projects in various fields financed by the EU and Czech Republic, as well as private research institutions.