Drone Research Project Outcome
TAČR Program: TAČR FW – TREND, Podprogram 1 “Technologičtí lídři”, Soutěž 10. VS Programu na podporu průmyslového výzkumu a experimentálního vývoje TREND

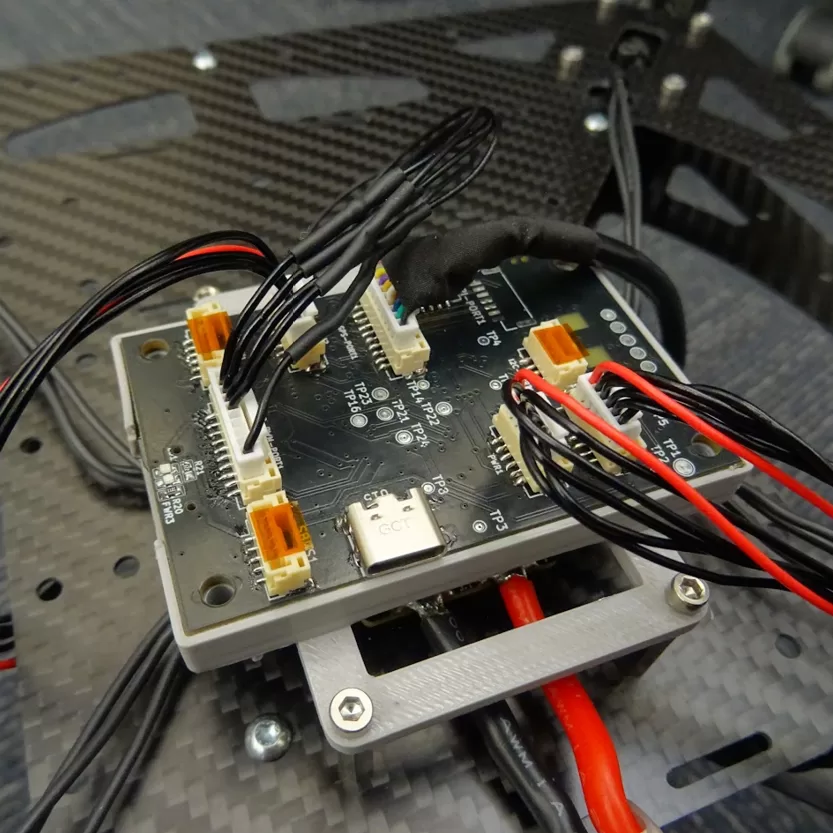
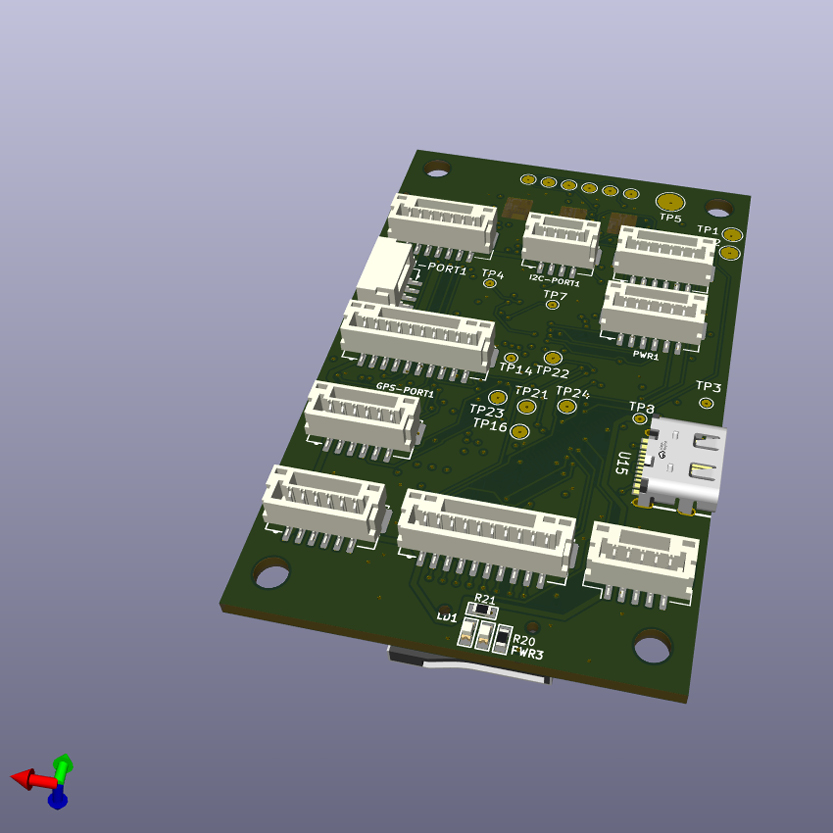
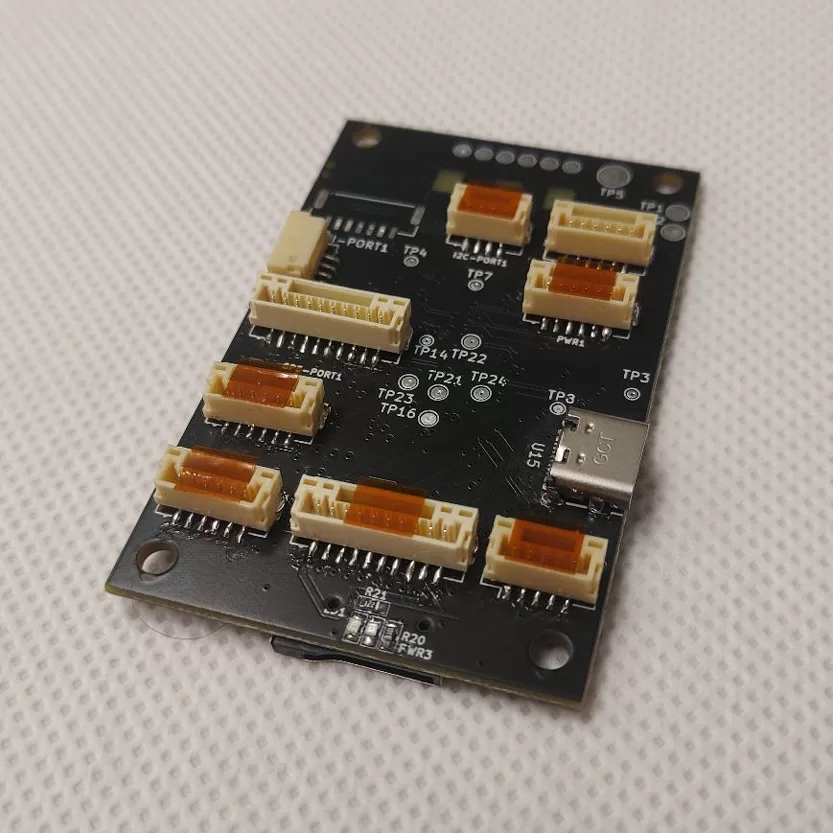
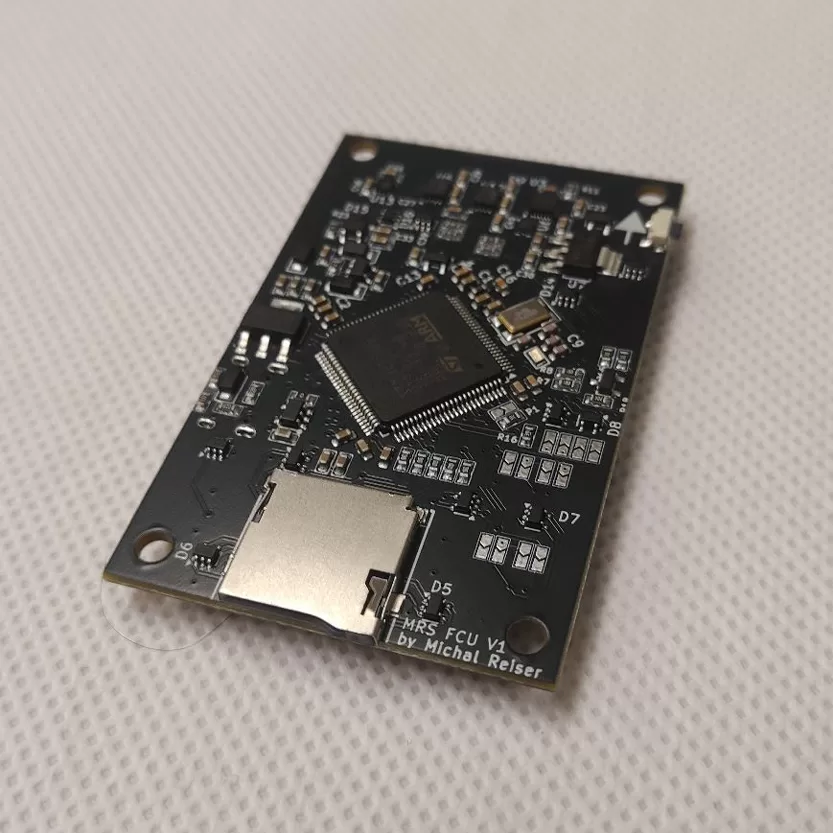
CZ: Výstupem V7 projektu FW10010379 INDAIR je vlastní řídicí jednotka (autopilot) určený pro manuální i autonomní řízení vícerotorových bezpilotních helikoptér. Cílem autopilotu je dosažení nezávislosti na komerčně dostupných a nespolehlivých autopilotech, které nelze přizpůsobit specifickým potřebám projektu. Autopilot je osazen potřebnými konektory, obvodem napájení, mikrokontrolérem pro čtení dat a stabilizaci letu a potřebnými senzory měřící lineární zrychlení, úhlové rychlosti, barometrickou výšku a magnetického pole Země. Pro osazený mikrokontrolér byl vyvinut firmware autopilota využívajícím FreeRTOS (real-time operating system) pro plánování a vykonávání procesů. Firmware zpracovává data a odhaduje z nich orientaci a pozici dronu, přičemž reguluje let v několika možných módech stabilizace, včetně regulace nákonu, regulace výšky, regulace pozice a autonomního režimu, kdy stabilizaci řídí připojený palubní počítač helikoptéry. Vyvinutý autopilot byl plně integrován se systémy palubní autonomie Fly4Future a byl úspěšně testován na testovací helikoptéře (FW10010379-V2 https://fly4future.com/
EN: The output V7 of the project FW10010379 INDAIR is a custom flight control unit (autopilot) designed for both manual and autonomous control of multirotor unmanned helicopters. The goal of the autopilot is to obtain independence from commercially available and unreliable autopilots, which cannot be customized to the specific needs of the project. The autopilot is equipped with necessary connectors, a power circuit, a microcontroller for data reading and flight stabilization, and essential sensors measuring linear acceleration, angular velocity, barometric altitude, and the Earth’s magnetic field. A firmware for the microcontroller was developed using FreeRTOS (real-time operating system) for task scheduling and execution. The firmware processes data and estimates the drone’s orientation and position while regulating flight in several possible stabilization modes, including attitude control, altitude control, position control, and an autonomous mode, where stabilization is controlled by the helicopter’s onboard computer. The developed autopilot was fully integrated with the Fly4Future onboard autonomy systems and successfully tested on a test helicopter (FW10010379-V2 https://fly4future.com/
Závislosti (Dependencies):
- FreeRTOS https://www.freertos.org/