Drone Research Project
Aerial platform for autonomous inspections in a fragmented indoor environment
Aerial Platform for Autonomous Inspections in Rugged Indoor Environment
Application
Robots for autonomous inspections
Industrial facilities, energy infrastructure, and manufacturing plants increasingly require inspections in complex and hazardous environments, such as high structures, confined spaces without GPS, or areas difficult or dangerous for human access.
Autonomous drones and robotic systems enable:
- Regular visual and sensor-based inspections of pipelines, structures, roofs, or storage systems without the need for scaffolding or lifts.
- Real-time mapping and anomaly detection (e.g., cracks, corrosion, leaks, deformation) that significantly reduce the risk of unexpected failures or downtime.
- Reliable operation in GNSS-denied environments such as indoor halls, tunnels, or power stations — where conventional manual inspection is limited or impossible.
- Shorter maintenance shutdowns thanks to fast deployment and the ability to access hard-to-reach areas, minimizing operational interruptions and reducing costs.

Solution
Transforming Industrial Inspections into Actionable Intelligence
Our solution combines robust hardware, advanced autonomy, and flexible sensor integration to turn raw inspection data into meaningful insights that improve safety, efficiency, and decision-making.
-
The platforms are designed to operate both in GNSS and GNSS-denied environments, featuring advanced localization, obstacle avoidance, and fully autonomous flight trajectories.
-
The mission-planning interface allows operators to define inspection points, automate scan patterns, and monitor telemetry in real time, including battery status, sensor data, and communication link quality.
-
A modular design supports various sensor configurations (thermal cameras, LiDAR, optical or ultrasonic sensors), customizable for specific inspection needs such as structural integrity, pipelines, or machinery.
-
Multi-robot coordination enables cooperative missions, for example, simultaneous scanning of interior and exterior areas, synchronized data acquisition, and faster coverage of large sites.
-
The user interface provides straightforward mission setup, result visualization, and data interpretation tools, transforming every inspection into a source of actionable operational intelligence.
See the Project Outcomes
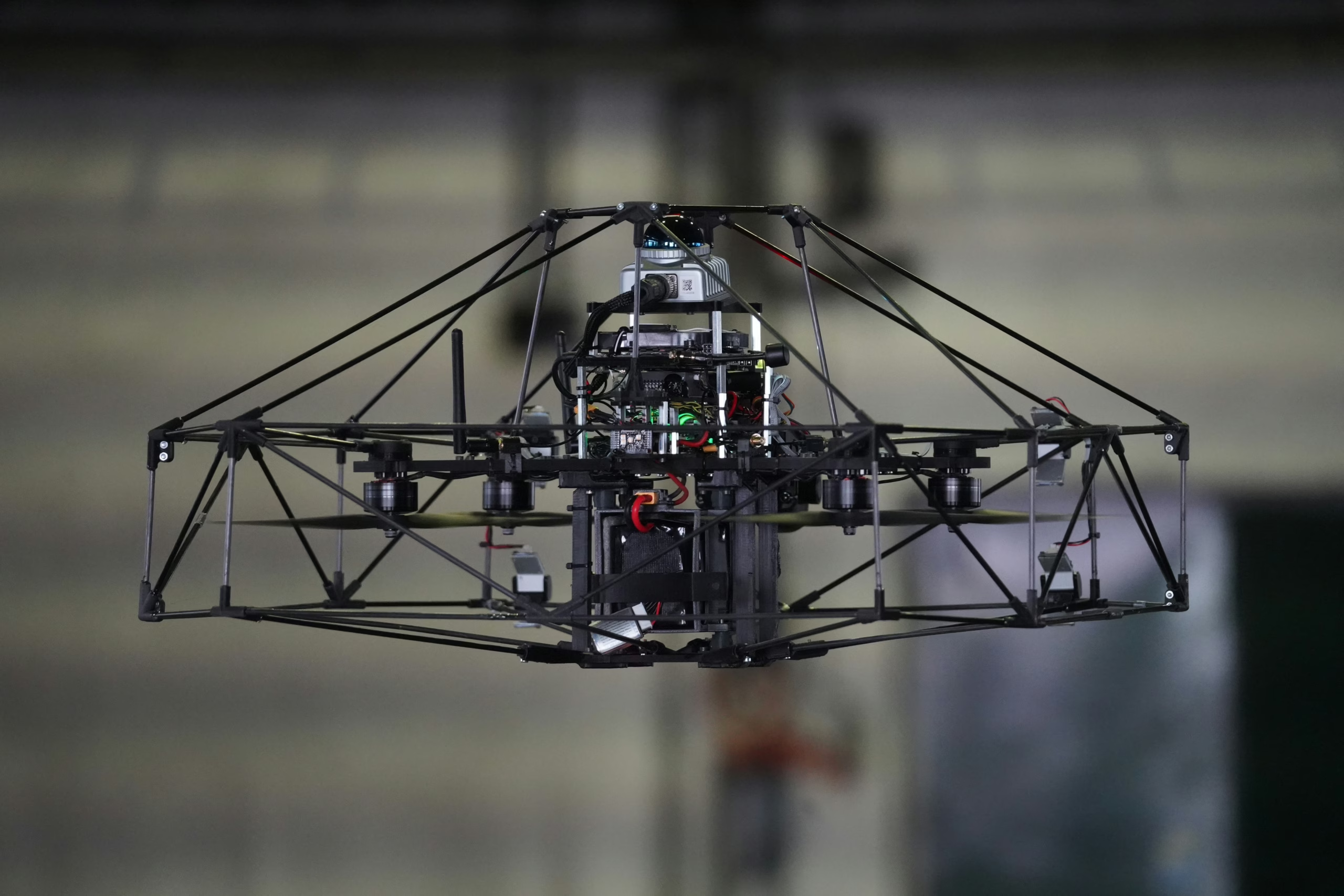
HW functional sample of unmanned helicopter with integrated flight control unit.
Functional sample of drone flight control unit.



Project Funding
This project is co-financed from the state budget by the Technology agency of the Czech Republic under the TREND Progamme

Project Details
Project ID: FW10010379
Programme: TREND 10 Aerial platform for autonomous inspections in a fragmented indoor environment
Time Period: 01/2024 – 6/2026
Other Projects
Discover

AI Flying Robot for Safe Capture of Unauthorized Drones
EU co-funded project aiming to create AI-equipped flying robot for safe capture of unauthorized drones in protected space

Autonomous Air and Ground Robots

Autonomous Solar Park Maintenance
System for automated monitoring and maintenance of solar parks employing artificial intelligence and unmanned aerial platforms.

We Help You to Establish Flying Robots’ Research/Lab
From modular drones to tailored software and field-tested platforms, we help you build and scale your research in autonomous flying systems.

Multi-Robot Aerial System for Autonomous Surveillance and Inspection
Multi-robot aerial system for autonomous surveillance and inspection of large industrial complexes resistant to communication and GNSS signal failures.

Drone Delivery
Research project focusing on supporting implementation of urban air mobility for parcel delivery.
Explore
What We Do
Custom Drones
We custom-build ready-to-fly fully autonomous drones that can be adjusted for any application and industry.

Development & Prototyping
We design and develop advanced autonomous aerial systems to meet the particular needs of our individual clients.

Research Projects
We participate in many projects in various fields financed by the EU and Czech Republic, as well as private research institutions.